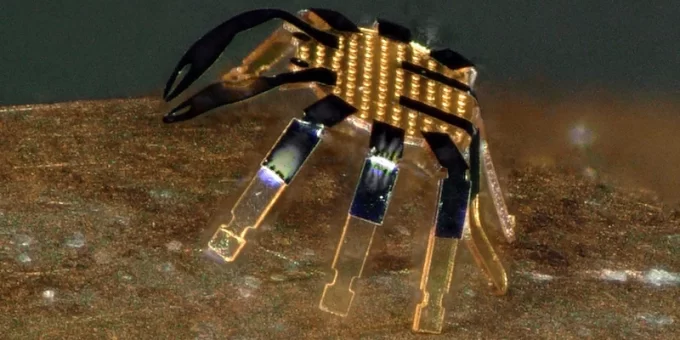
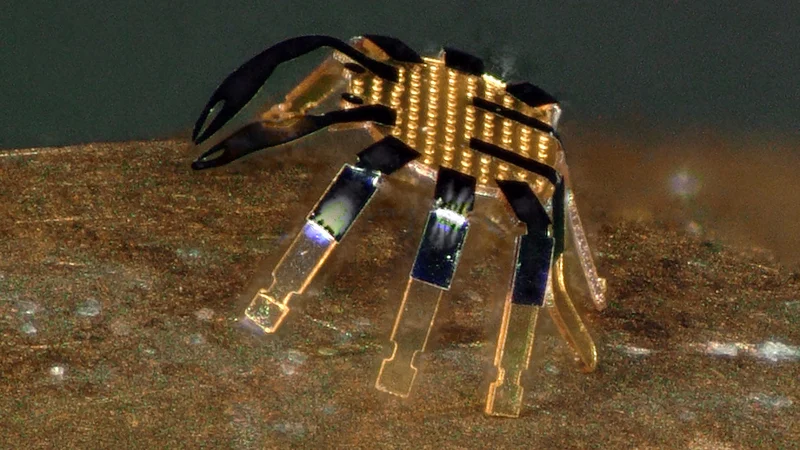
Действительно ли ваш крошечный робот такой уж маленький, если его ширина больше ширины монеты? Группа ученых создала самого маленького в истории дистанционно управляемого шагающего робота, ширина которого составляет всего полмиллиметра (менее пятидесятой части дюйма).
У чрезвычайно миниатюрных роботов есть целый ряд потенциальных применений — от помощи в хирургических операциях до ремонта механизмов в местах, куда не пролезет гаечный ключ. Чем меньше они становятся, тем в большем количестве сценариев их можно использовать.
Хотя этот бот еще не готов к тому, чтобы отправиться в мир и заняться ремонтом, он действительно впечатляет.
Он выглядит и двигается как миниатюрный краб peekytoe, форма которого, по словам исследователей, была выбрана по «творческой прихоти». Разработанные ими методы могут быть использованы для создания крошечных роботов практически любой необходимой формы.
«Наша технология позволяет выполнять различные контролируемые движения и может ходить со средней скоростью половины длины тела в секунду», — говорит инженер-механик Йонгган Хуанг из Северо-Западного университета в Иллинойсе.
«Этого очень сложно достичь в таких малых масштабах для наземных роботов».
Технология, на которой основан робот, была первоначально разработана восемь лет назад и не отличается от раскрывающейся книги: детали робота крепятся к растягивающейся резиновой подложке, и когда материал расслабляется, устройство всплывает, принимая свою форму.
Тщательно калибруя детали основы, можно точно контролировать форму робота. Аналогичный подход используется и с подвижными частями робота, которые изготавливаются из сплава с памятью формы. Эти материалы меняют свою форму в зависимости от того, нагреваются они или нет.
Лазеры, действующие как пульт дистанционного управления, используются для нагрева определенных частей робота — когда эти части принимают другую форму, они двигают краба вперед. При этом нет необходимости в источнике энергии или двигателе, а тонкий слой стекла обеспечивает возвращение компонентов в исходную форму после охлаждения.
«Поскольку эти структуры настолько малы, скорость охлаждения очень высока», — говорит материаловед Джон Роджерс из Северо-Западного университета. «На самом деле, уменьшение размеров этих роботов позволяет им работать быстрее».
Направляя лазеры на различные участки робо-краба, исследователи могут задавать направление движения. Регулируя частоту лазерного сканирования, можно изменять и скорость движения робота.
Это следующий шаг в рамках тенденции, согласно которой роботы со временем становятся все меньше и меньше, будь то для того, чтобы сделать их более устойчивыми к внешним воздействиям, для нацеливания лекарств для лечения заболеваний или для создания больших модульных структур из более мелких частей.
Исследователи говорят, что их новый процесс обладает большим потенциалом: например, они могут заставить роботов поворачиваться и прыгать, используя те же методы. Пока робот находится в пределах прямой видимости лазера, им можно управлять дистанционно.
«Робототехника — захватывающая область исследований, а разработка микромасштабных роботов — интересная тема для академических изысканий», — говорит Роджерс.
«Вы можете представить себе микророботов в качестве агентов для ремонта или сборки небольших конструкций или машин в промышленности или в качестве хирургических помощников для очистки закупоренных артерий, остановки внутреннего кровотечения или удаления раковых опухолей — все это в рамках минимально инвазивных процедур».
Исследование было опубликовано в журнале Science Robotics.
Оригинал earth-chronicles.ru