Марсоход «Кьюриосити», запущенный в рамках программы NASA «Марсианская научная лаборатория», начал исследовать Красную планету почти семь лет назад. За это время марсоход проехал около 20 километров. По земным меркам это немного, но если вспомнить, насколько сложно управлять аппаратом, передвигающимся по поверхности Марса, приходится признать: это огромное достижение ученых, инженеров и программистов, участвующих в проекте. Но как именно работают «водители» марсохода? Об этом мы поговорили с Алексеем Малаховым, старшим научным сотрудником отдела ядерной планетологии Института космических исследований РАН, отвечающим за работу российского научного прибора ДАН на борту ровера. В рамках этого проекта ИКИ активно взаимодействует с американской стороной, в том числе по вопросам выбора очередных целей для изучения.
Межпланетная связь
Конечно, телеуправление «Луноходом-2» в реальном времени не было идеальным — картинка с камер аппарата обновлялась лишь раз в четыре секунды. Удаленный советский экипаж, состоявший из командира, штурмана и оператора остронаправленной антенны, должен был приспосабливаться к тому, что от картинки до подачи сигнала проходит заметная пауза. И все же это было ручное управление, а не «пошаговое», как у американских планетоходов на Марсе.
Сеансы связи «Кьюриосити» с Землей происходят лишь дважды в сутки, в начале и в конце марсианского дня, причем не напрямую. В теории марсоход способен передавать данные на Землю через собственную антенну, но на практике его передатчикам для этого не хватает энергии. Поэтому связь осуществляется через спутники, вращающиеся вокруг Марса, — Mars Odyssey, Mars Reconnaissance Orbiter и Trace Gas Orbiter.
Каждый из двух суточных сеансов связи ограничен временем, в течение которого конкретный спутник находится в зоне видимости марсохода. Сеансы коротки, порядка десятка минут, в самом лучшем случае — десятков минут, в зависимости от наклона орбиты и высоты орбиты спутника.

Антенна DSS-36, установленная в районе Канберры; входит в сеть дальней космической связи NASA, которая передает и принимает сигналы с марсианских (и не только марсианских) аппаратов
Для Марса такая орбита тоже есть, она называется ареостационарной. Но дело в том, что она находится на высоте около 17 тысяч километров над поверхностью планеты (большая полуось, или среднее расстояние от этой орбиты до центра планеты, составляет 20 428 километров). Это значит, что ареостационарная орбита пролегает между орбитами Деймоса (большая полуось орбиты — 23 458 километров) и Фобоса (9 376 километров). Спутник связи, если его туда послать, окажется под воздействием гравитации сразу двух близких тел, «дергающих» его в противоположных направлениях.
Это обстоятельство, а также специфика распределения масс в разных точках Марса означают, что на ареостационарной орбите спутник должен будет включать двигатели для удержания своей орбиты раз в несколько дней, а не раз в несколько недель, как на аналогичной орбите у Земли. Иными словами, он или будет массивнее околоземного геостационарного аналога, или проживет совсем недолго.
Возможно, именно с этими трудностями связано то, что NASA, еще в 1999 году анонсировавшее развертывание спутников связи на ареостационарной орбите, так и не реализовало свои планы и даже ликвидировало соответствующий раздел на своем сайте.
Именно поэтому роль спутников связи на Марсе выполняют научно-исследовательские спутники, чья главная задача — картографировать поверхность Марса и собирать о ней другие данные. По словам Алексея Малахова, обеспечение связи с марсоходом для них — дополнительная нагрузка, по большому счету, не соответствующая их прямому назначению.
Но нормальной связи между «Кьюриосити» и Землей мешает не только все вышеперечисленное. Раз в два года Марс и Земля оказываются в положении, когда Солнце блокирует Красную планету от электромагнитных волн с Земли. Состояние это длится примерно месяц (в 2019 году оно придется на август-сентябрь), и, конечно, в течение всего этого времени управлять марсоходом или получать от него научные данные невозможно. Поэтому аппарат просто впадает в «спячку».
Стратегия для марсохода
Обычно ситуация выглядит так. В во второй половине марсианского светового дня данные от «Кьюриосити» отправляются наземным станциям NASA, а от них — операторам. Те рассматривают снимки объектов, окружающих марсоход (как правило, речь идет о черно-белых снимках относительно низкого разрешения с технических камер контроля перемещения), и выбирают наиболее интересные с научной точки зрения. У миссии есть ведущий ученый, и под его руководством другие ученые, работающие с разными приборами, вырабатывают общую точку зрения на то, куда в данный момент лучше всего направить марсоход.
Как отмечает Алексей Малахов, иногда, естественно, возникают определенные разногласия: одним исследователям больше интересен один вариант действий, вторым — другой. Но все эти противоречия решаются в рабочем порядке.
«Динамическое Альбедо Нейтронов» (ДАН) — российский научный прибор на борту «Кьюриосити». Он содержит импульсный нейтронный генератор, испускающий быстрые нейтроны (до 107 на импульс) микросекундными «пакетами», и приемник нейтронного излучения в тепловом и эпитепловом диапазонах. Нейтроны проникают в грунт Марса, где взаимодействуют с ядрами основных породообразующих элементов, замедляясь и теряя энергию. Часть замедлившихся нейтронов поглощается грунтом, а часть выходит обратно на поверхность, где их регистрирует приемник нейтронного излучения.
Если в грунте присутствуют водородосодержащие соединения (связанная вода или водяной лед), то замедление быстрых нейтронов происходит наиболее эффективно, поскольку при столкновении с ядром водорода нейтрон теряет сразу половину своей энергии. Это делает российский прибор незаменимым инструментом для поиска следов воды в грунте Марса.Во время движения «Кьюриосити» ДАН работает в «пассивном» режиме, измеряя естественное нейтронное излучение от Марса. Во время остановок ДАН переходит в «активный» режим — с включением нейтронного генератора и измерением отклика поверхностных пород от искусственных нейтронов, которыми их обстреливает генератор.
К 7 июля 2019 года ДАН провел почти 5000 пассивных измерений и около 1000 активных. В общей сложности генератор выдал около 10 миллионов нейтронных импульсов. Ресурс прибора, назначенный производителем, давно истек, но блок продолжает исправно работать. За это время ДАН побывал на более чем 700 «стоянках» марсохода.
В среднем в районе кратера Гейла, где уже семь лет путешествует «Кьюриосити», ДАН смог найти 1-2 процента воды по массе в грунте. В отдельных местах ДАН нашел в грунте и 3–5 процентов воды по массе, но таких точек немного (до 10 процентов от общего числа измерений).
Определившись с тем, что в данный момент окружает аппарат, ученые составляют для него план работы на следующий рабочий цикл — двигаться ли ему дальше или, например, сверлить грунт в заранее намеченной точке. Общая циклограмма работы (точное расписание команд, подаваемых на исполнительные органы технических комплексов) складывается из предложений участников всех экспериментов а затем посылается антенной дальней космической связи на борт аппарата.
По словам Алексея Малахова, наземная команда управления подстраивается так, чтобы первый сеанс связи приходился на начало процесса планирования, а второй — на завершающий этап, когда циклограмма уже составлена и готова к отправке. Как правило, план работы «Кьюриосити» определяется на несколько суток вперед, но после каждого сеанса связи в него могут вноситься уточнения, связанные с перемещением марсохода. Это неизбежно, потому что каждые сутки аппарат присылает новые снимки, на которых видны новые объекты — или новые препятствия, возникающие на его пути.
Кто ведет
Это позволяет марсоходу двигаться в двух режимах, каждый из которых подразумевает не только простое следование командам, но и собственные действия. Первый из них — «слепое» вождение. Его применяют, когда камеры аппарата на момент сеанса связи дают достаточно ясное изображение маршрута и наземные планировщики могли определить, нет ли на нем серьезных препятствий. После этого аппарату поступает команда проехать определенную дистанцию в определенном направлении «вслепую», то есть без использования камер.
Чтобы планетоход понял, что уже проехал заданную дистанцию, его компьютер следит за вращением колес, подсчитывая число полных поворотов (63 сантиметра пути на один полный поворот без буксовки). Этот режим обеспечивает максимальную скорость движения «Кьюриосити» — до 0,04 метра в секунду, в 40 раз медленнее человека-пешехода на Земле.
При езде вслепую компьютер марсохода не проверяет по камерам, происходила ли по пути пробуксовка. Поэтому существует второй режим движения, связанный с огибанием препятствий. Его активируют, если маршрут не свободен для «слепой езды». Он требует частых остановок для получения стереоизображения в направлении движения, после чего бортовое ПО марсохода анализирует «картинку». При этом ПО исходит из переменных, заданных планировщиками, например останавливается для анализа изображения через строго заданные промежутки времени. Также операторы могут выбрать, какой именно тип решений примет аппарат, если обнаружит препятствие, — остановится до конца рабочего дня или продолжит движение.
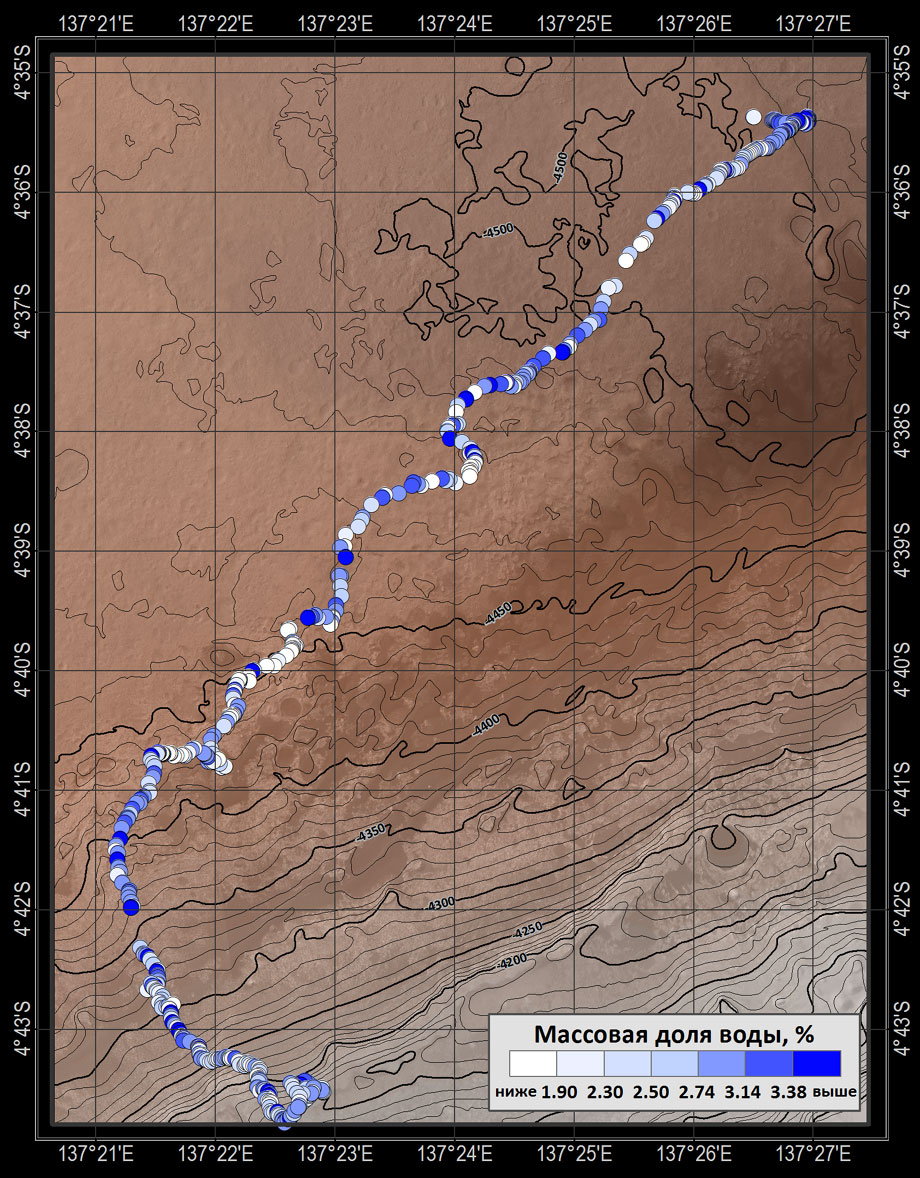
Путь «Кьюриосити» и точки сбора данных прибором ДАН
Понятно, почему «Кьюриосити» движется с такой осторожностью. Но за безопасность приходится платить: скорость марсохода в этом режиме падает до 0,02 метра в секунду, то есть в 80 раз медленнее земного пешехода.
Для дополнительной безопасности есть еще третий режим — визуальной одометрии. В нем марсоход делает остановки и с помощью камер оценивает расстояние, пройденное им за время движения. Затем он сравнивает его с числом оборотов колес. Если расстояние по камерам получается много меньше, чем то, что «насчитал» компьютер, значит, колеса буксуют практически на одном месте.
Операторы могут установить лимит допустимой пробуксовки, чтобы марсоход, наткнувшись на труднопроходимый участок, остановился и подождал следующего сеанса связи, дав операторам возможность принять решение о продолжении движения.
«Сто метров — максимум»
Но луноходы напрямую управлялись человеком практически в режиме реального времени, а не ежесуточными циклограммами. Если их оператор допускал ошибку, ее можно было быстро исправить. В этом — одна из причин, по которой луноходы передвигались на порядок быстрее марсоходов.

Центр управления луноходами
Команда управления «Кьюриосити», по словам Алексея Малахова, «очень дотошно и аккуратно» следит за тем, чтобы правильно выбрать маршрут и избежать препятствий. Плюс к этому аппарат с помощью гироскопов следит за углом своего наклона относительно поверхности, чтобы в случае, если допустимый угол окажется превышен, немедленно остановить движение.
По этой же причине длина одного суточного передвижения марсохода никогда не планируется на Земле «вслепую» — дальше, чем позволяет увидеть очередной снимок. «Кьюриосити» редко преодолевает больше нескольких метров или нескольких десятков метров за один цикл планирования. «Сто метров — это максимум из того, что я вообще помню», — говорит Алексей Малахов.
И даже для таких коротких отрезков операторы используют много вспомогательных наземных инструментов, помогающих оценить опасность столкновения с непроходимым препятствием, вплоть до 3D-стереомоделирования марсианской поверхности.
Может возникнуть вопрос: почему на марсоход нельзя поставить такой же мощный искусственный интеллект, как у беспилотников Waymo, чтобы он самостоятельно планировал маршрут? Кажется, это позволило бы быстрее двигаться от точки к точке.
На это можно ответить так. Семь лет назад, когда «Кьюриосити» готовился к старту с земли, успехи искусственного интеллекта в беспилотном вождении еще не были так велики, как сегодня. Но главное, хотя «Кьюриосити» и является самым мощным марсоходом в истории, его мощность не превышает 110 ватт. Это в полтора раза ниже электрической мощности советских луноходов.
При движении ему необходимо снабжать энергией несколько электромоторов, камеры и научные инструменты. Для нужд компьютера остается не больше десятка ватт. Типичные компьютеры современных беспилотных авто требуют 500 ватт. К тому же электроника планетоходов должна быть устойчивой к жесткому радиационному воздействию, а это тоже накладывает ограничения на ее производительность по сравнению с обычной «земной».
Связано это с тем, что частицы космических лучей, проходя сквозь полупроводник, оставляют за собой шлейф из свободных носителей заряда, провоцируя возникновение электрон-дырочных пар, способных переключить транзистор в неправильное состояние. Чем меньше транзистор, тем меньший заряд переключает его состояние, поэтому самые компактные и быстрые транзисторы в космосе надежно не работают.
Наконец, вспомним, что земные «беспилотники» на улицах все еще ездят либо с водителями-инженерами за рулем, либо с инженером на заднем сидении, страхующим автомобиль с помощью планшета и способным в любой момент остановить машину, если автопилот даст сбой.
По мнению Алексея Малахова, настоящий искусственный интеллект для беспилотного вождения планетоходов появится не раньше, чем подобные системы без каких бы то ни было ограничений приживутся на Земле. Слишком высоки ставки — транспортное средство стоимостью 2,5–3 миллиарда долларов необходимо оградить от малейшего риска попасть в ДТП.
Вечная батарейка
Ограниченные энергетические возможности марсохода диктуются тем, что он питается от РИТЭГ — радиоизотопного термоэлектрического генератора. РИТЭГ состоит из 4,8 килограмма диоксида плутония-238, а кроме того — термопары и защитного кожуха. Общая масса РИТЭГ — 45 килограмм, но его мощность не превышает 110 ватт. Это значит, что для движения марсоходу желательно накапливать запас энергии. С этой целью он снабжен литиевыми батареями общей емкость 42 ампер-часа (сходные по емкости можно найти в электровелосипедах).

Радиоизотопный термоэлектрический генератор (РИТЭГ) на корпусе марсохода «Кьюриосити»
Необходимость накапливать энергию перед движением, а также тот факт, что ночью на Марсе камеры нормально работать не могут, заставляют «Кьюриосити» примерно половину марсианского сола (марсианских суток) проводить во сне. Кроме того, спячка длиной в месяц неизбежна каждые два года, когда Марс находится по другую сторону от Солнца и связи с марсоходом нет.
Все же нельзя не отметить, что использование РИТЭГ, несмотря на все его ограничения по мощности, — настоящая революция для планетоходов. Еще «Оппортьюнити» и «Спирит» использовали солнечные батареи. Во время пылевых бурь на Марсе пиковая выработка энергии, выдаваемая фотоэлементами «Оппортьюнити» в полдень, падала с 800 до 128 ватт-часов, при этом в ночную половину суток они, разумеется, не работали.
Из-за этого аппараты на долгие недели впадали в спячку в ожидании улучшения погодных условий. К тому же, застряв в песке и потеряв возможности оптимальным образом сориентироваться по Солнцу за счет разворота корпуса, «Спирит» в итоге истратил запас энергии и перестал выходить на связь.
Кроме того, солнечные батареи просто не смогли бы придать подвижность по-настоящему тяжелому «Кьюриосити», чей вес составляет 900 килограмм — впятеро больше прежних марсоходов. Да и питать заметную научную нагрузку от солнечных батарей на Марсе, где слишком мало солнечного света, не получится. Научные приборы «Кьюриосити» имеют массу в 75 килограмм, тогда как у его предшественников их вес не превышал пяти килограмм.
Наконец, фотоэлементы как источник энергии заметно повышают вероятность потери марсохода. Сильная песчаная буря может занести солнечные батареи планетохода пылью, и в результате даже после того, как буря закончится, они не смогут выдавать полную мощность. РИТЭГ это не грозит. Как говорит Алексей Малахов: «Эта батарейка надолго переживет все прочее в “Кьюриосити”, потому что марсоход начнет ломаться в других местах».
Оригинал earth-chronicles.ru